|
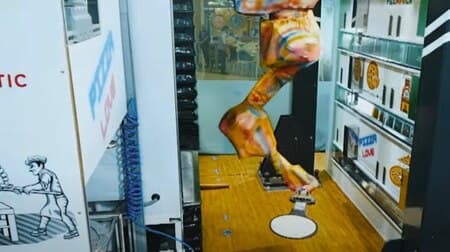
| 上右:3D マシンビジョンシステム「RV1100」 上左:バラ積み部品の 3D 認識をデモンストレーション 下:実際の現場では、多くの場合上から撮影するよう設置される |
マシンビジョンとは、耳なじみのない言葉かもしれない。これは、カメラで撮影した画像を解析して何らかの認識を行う処理であり、工場で製造作業を自動する際に必要となる技術である。特にキヤノンの RV1100 は、パレットにバラバラに置かれた(バラ積みされた)複数ある部品の位置と向きを3次元的に把握し、ロボットに各部品を把持(はじ)させられるよう位置/向きデータなどを伝える機能を備える。これにより、人間が手作業で行うことの多い、バラ積み部品を1つ1つ取り出して整えて配置する作業を自動化できる。
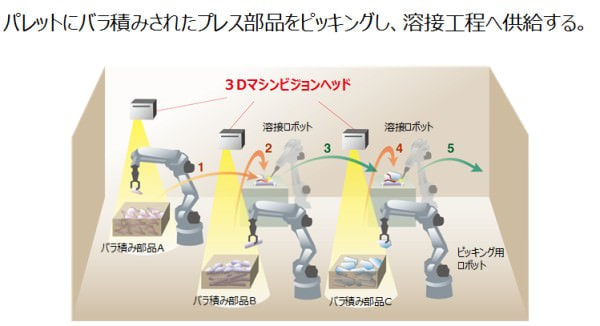 |
| RV1100 の利用例 |
RV1100 の特徴は、(1)認識可能な部品の種類が多く多彩なワーク(作業)に対応できる、(2)設置とワーク登録が簡単に行える、(3)部品の 3D 位置/姿勢を1回の処理で計測できること。
(2)については、設置を始めてから実際に運用を始めるまでの時間が競合他社システムに比べ80%も短縮可能としている。その要因は、まずサイズが約252×206×124mm、重さが約 6kg の本体に計測用パターンを照射するプロジェクタと撮影用のカメラが一体化されていて、設置作業が容易なためだ。そして、ワーク登録は部品の CAD データを入力し、バラ積みされた部品の状態を5種類撮影するだけなので、プログラムを組む場合に比べ作業時間が圧倒的に少ない。
(3)については、RV1100 がパターンをバラ積み部品に照射し、それをカメラで捉えて解析用パソコンで一気に部品の 3D 位置/姿勢を取得して「部品がこの場所にこの向きで置かれていて、把持できる」といったデータをロボットアームに送るのだが、約2.5秒で済んでしまう。他社システムだと位置決めをするための 2D ビジョンセンサーや部品を一時的に置く仮置き台が必要になることがあるのに対し、RV1100 は仮置き処理が不要であり、製造ラインの簡素化にも繋がる。
 |
| 上:パターン(この場合は縞模様)を照射して 3D 認識 下:ロボットアームに指示して把持 |
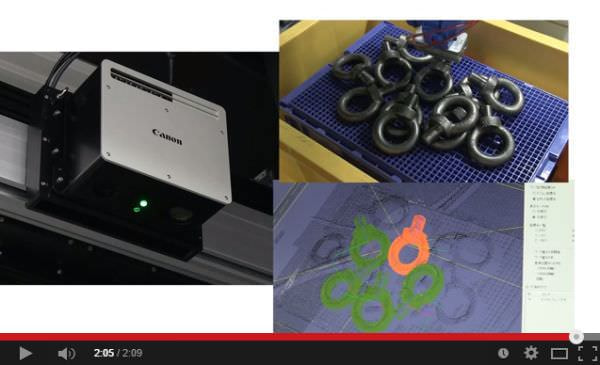 |
| 上から撮影し(画像左)、部品を認識し(画像左下)、その部品を把持する(画像右上) |
現在 RV1100 が対応可能なのは、最大測定範囲が縦1,160×横1,160×深さ 600mm で、把持指示できる部品のサイズは形状によって大きく異なるが目安としておよそ 45mm 角。ユーザー企業からはより大きな部品、より小さな部品への対応も求められており、今後の課題となる。
| RV1100 の紹介動画 |